Projects & Competitions
Table of Contents
- Competition: BCIT Engineering Competition 2024
- New Project: PLC Programming & HMI Elevator Programming
- Project 1: Humanoid Robot Simulation (In Progress)
- Project 2: Sticker Identification for Kid's Game
- Project 3: RC Car
- Project 4: Software SPI on MSP430
- Project 5: SCARA Drawing Robot
- Failed Projects: Autonomous Differential Drive Car & DIY Drone
BCIT Engineering Competition 2024: Delta Robot Gripper
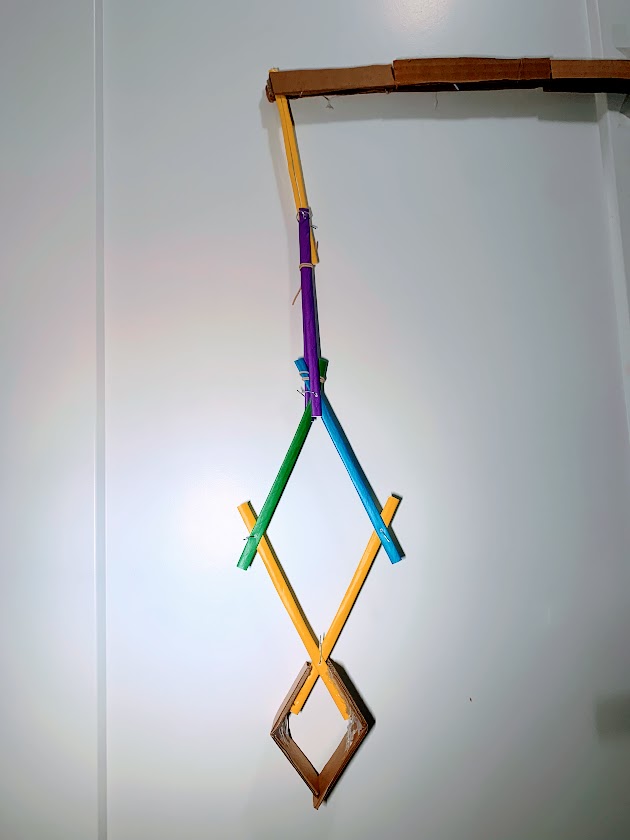
Participated in the BCIT Engineering Competition (Junior Design), where the goal was to design and build a device to rescue a person from a high-rise building within 2 hours and 45 minutes. The project combined industrial crane mechanisms with delta robot configurations for precision and efficiency.
- Delta Robot Gripper: Designed using drinking straws for flexibility and lightweight motion.
- Creative Material Usage: Utilized paper clips as joints and reinforced wooden dowels with cardboard and glue.
- Base Design: Employed a cardboard box to ensure stability and rapid assembly.
- Cost Efficiency: Completed within a budget of 90 BEC Bucks out of 250.
- Fast Build: Achieved under stringent time constraints.
PLC Programming & HMI Elevator Programming
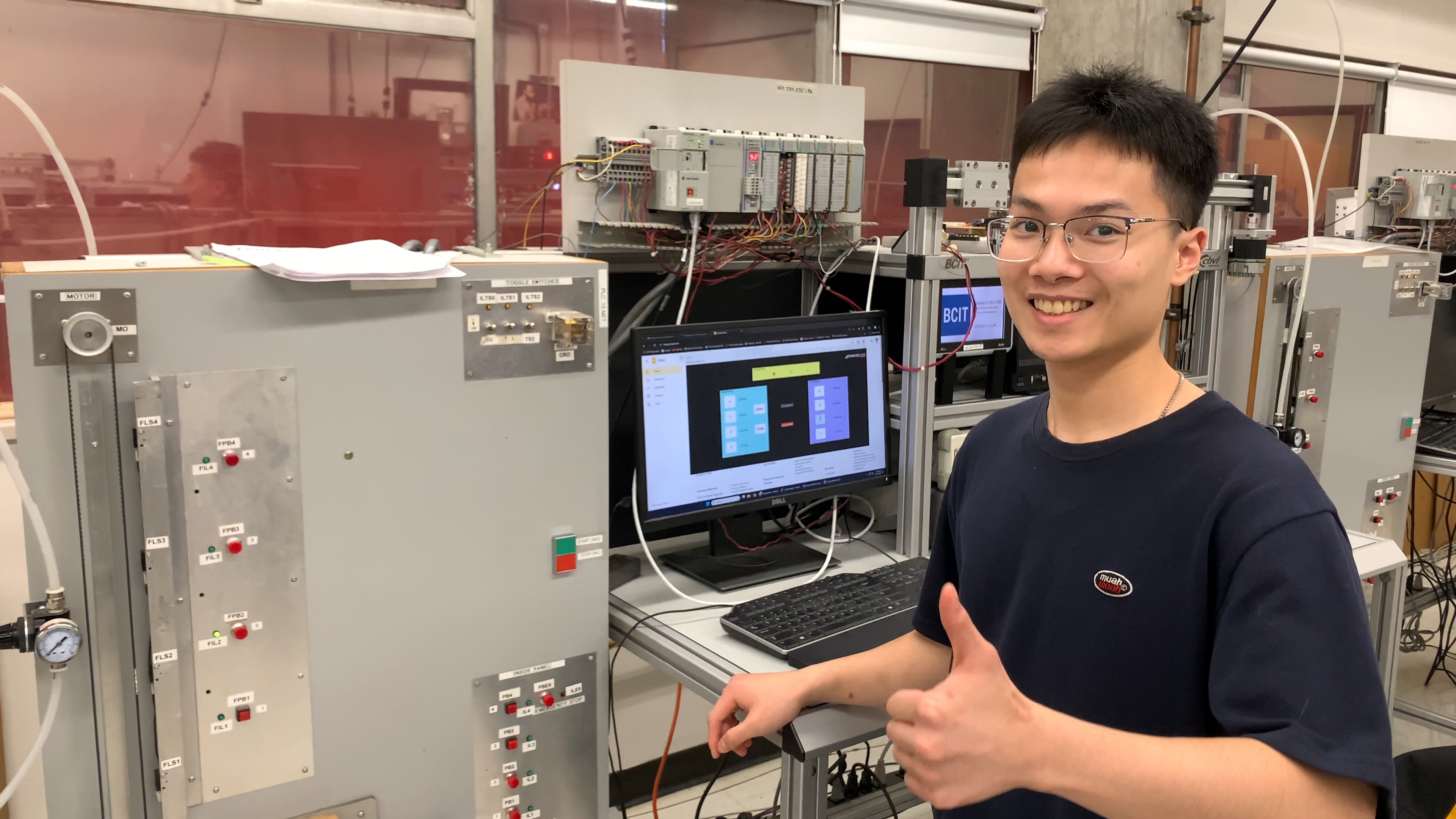
Developing a deployable, foolproof, and scalable PLC program in ladder logic using a Finite State Machine approach, paired with a user-friendly and intuitive HMI built with open-sourced AdvancedHMI software. This project aims to streamline elevator control with enhanced reliability and ease of operation.
- PLC Ladder Logic: Deployable and scalable design using a finite state machine.
- HMI Interface: Intuitive design using AdvancedHMI for user-friendly operation.
Humanoid Robot Simulation (In Progress)
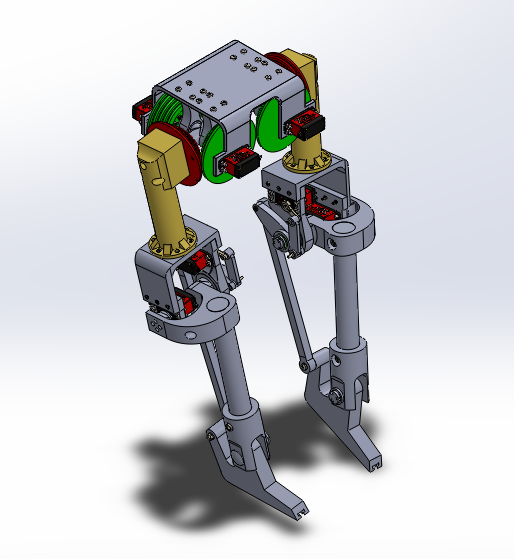
Currently designing and simulating a humanoid robot inspired by the Bruce robot from WESTWOOD Robotics. This project integrates advanced 3D modeling, dynamic motion planning, and reinforcement learning to achieve autonomous functionalities in a virtual simulation environment.
- 3D Modeling & Simulation: Utilizing SolidWorks and ROS/Gazebo for virtual prototyping.
- Motion Planning & Control: Developing algorithms for dynamic balance and movement.
- Reinforcement Learning: Training the robot for basic tasks and autonomous operation.
Sticker Identification for Kid's Game in Nesters Market
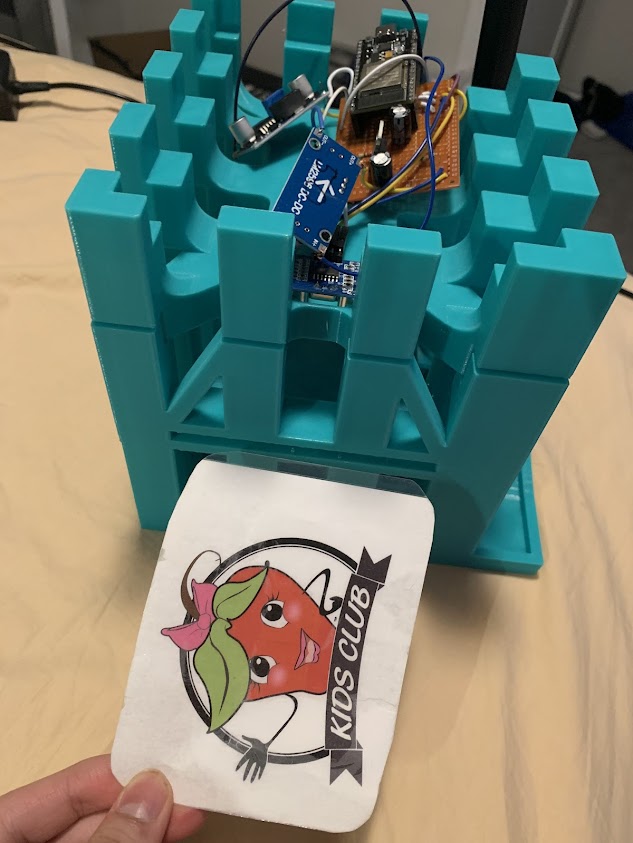
Developed a computer vision system using OpenCV to identify and classify stickers for a kid’s game at Nesters Market. The system processes images to trigger servo actuation, enabling interactive gameplay successfully tested in a live environment.
- Computer Vision: Utilized OpenCV for effective sticker detection and classification.
- Servo Actuation: Integrated system triggers physical responses for interactive gameplay.
- Real-World Testing: Successfully deployed and tested at Nesters Market.
RC Car

Designed and 3D-printed an RC car modeled after a real-sized automobile. The project replicates modern vehicle design on a smaller scale with detailed 3D modeling, Arduino-based control, and PID-regulated motion.
- 3D Modeling: Designed in SolidWorks and produced via 3D printing.
- Embedded Control: Arduino-based system with precise PID control.
- Bluetooth Control: Operates via a Bluetooth controller.
- Autonomy Challenge: Attempted full autonomous navigation, limited by power supply issues (switched from alkaline to lithium-ion batteries).
Software SPI on MSP430
Developed a software-based SPI receiver for the MSP430 microcontroller using assembly language. This project demonstrates low-level communication via bit-banging and precise GPIO control.
- Bit-Banging Technique: Achieved SPI functionality through precise timing and GPIO manipulation.
- Assembly Programming: Optimized code in MSP430 assembly for efficient data capture.
- Low-Level Communication: Demonstrated mastery of protocol synchronization.
SCARA Drawing Robot
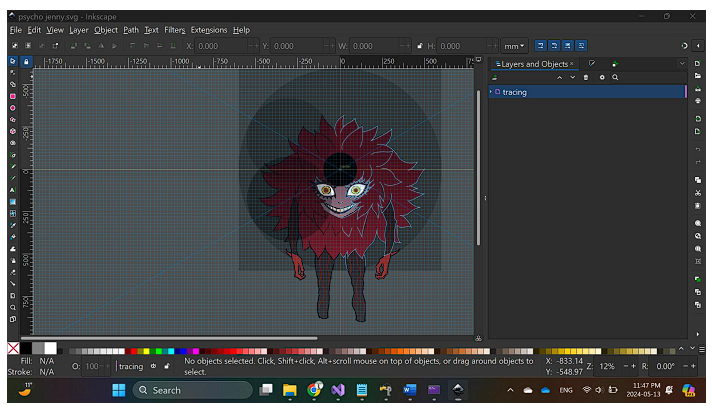
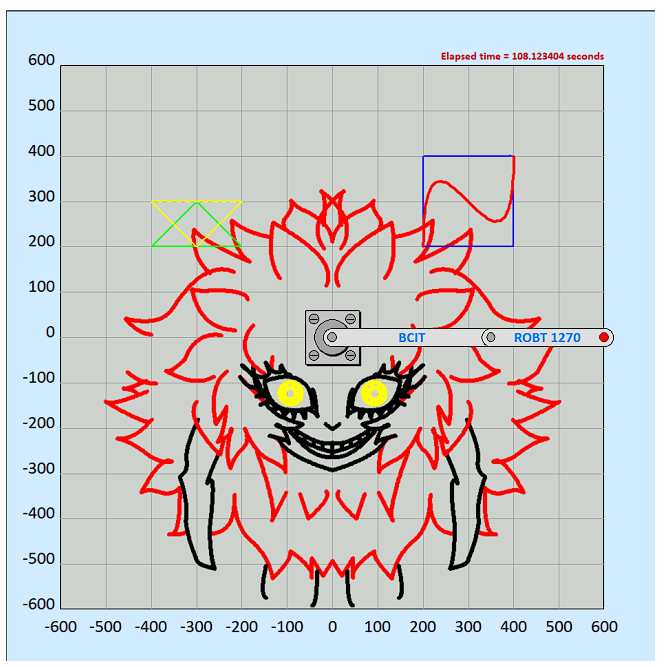
Created a SCARA robot capable of translating geometric paths into intricate drawings. Utilizing inverse kinematics and advanced path generation, the robot demonstrates precision in motion control for automated art and assembly tasks.
- Inverse Kinematics: Computed precise arm movements for accurate drawing.
- Geometric Path Generation: Utilized Bézier curves and arcs for smooth drawing paths.
- Robotic Motion Control: Achieved continuous and automated drawing patterns.
Failed Projects
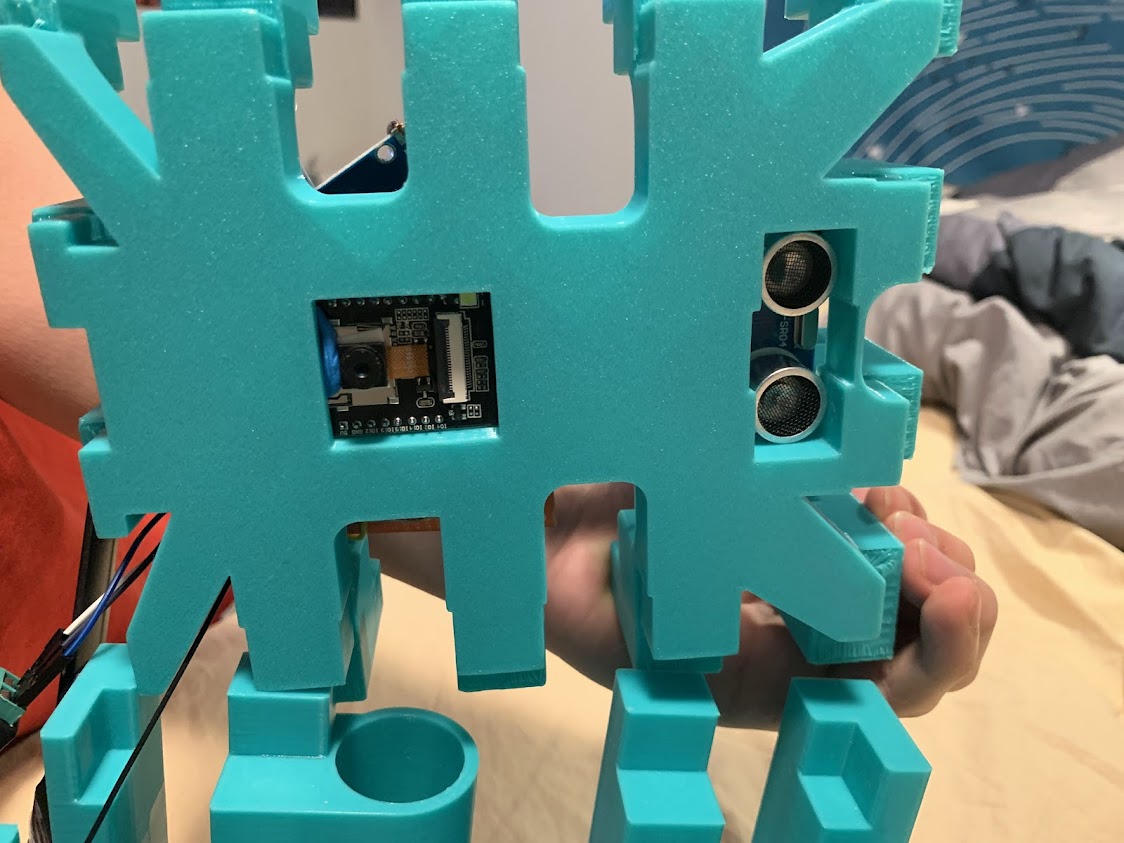
Autonomous Differential Drive Car (Failed Project)
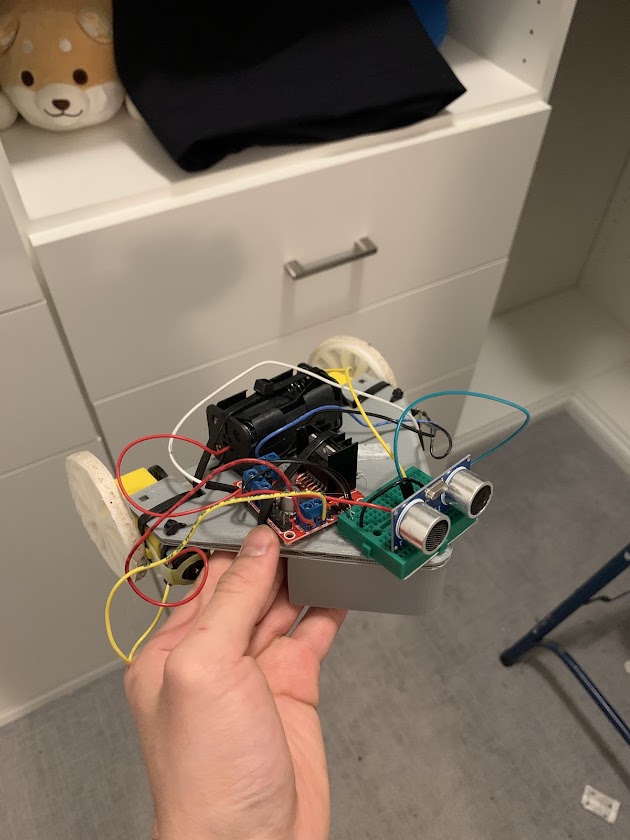

An ambitious project aimed at achieving autonomous navigation. The car was designed to drive via a Bluetooth controller with the lofty goal of full autonomy.
- Bluetooth Control: Operated via a Bluetooth controller.
- Autonomy Ambition: Attempted full autonomous navigation.
- Power Supply Challenge: Faced issues due to power supply limitations; improvements with lithium-ion batteries, yet full autonomy was not reached.
DIY Drone (Failed Project)
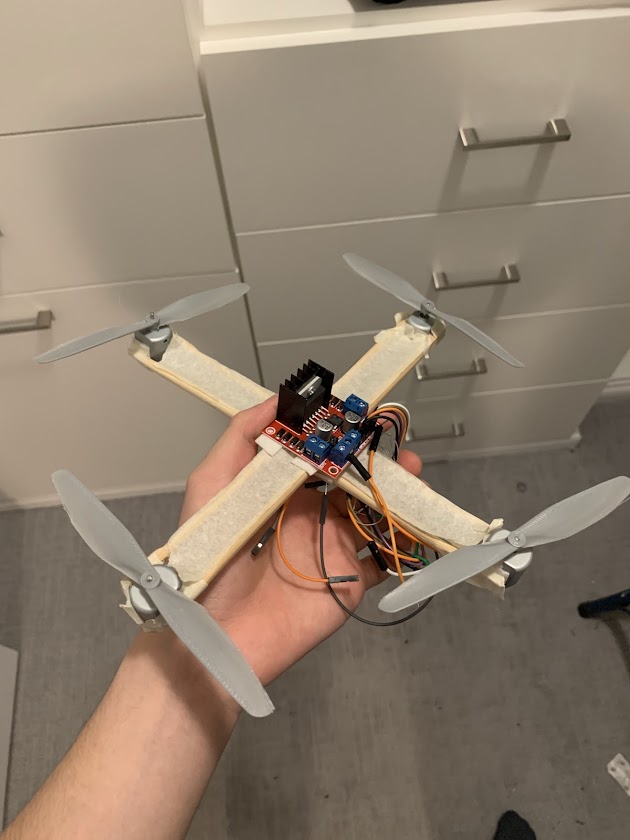

An experimental drone project that encountered challenges with soldering quality and weight distribution.
- Design Experiment: Explored innovative drone designs with cost-effective materials.
- Soldering & Weight Distribution: Faced issues with cheap solder and uneven weight distribution.
- Innovative Frame: Successfully created a lightweight frame using posicle sticks.